← All Stories
Porsche Ring, Estonia — April 2024
Teaching the Simulator
to Be Wrong Correctly
A simulation is only as accurate as the assumptions it is built on. In April 2024, we ran a dedicated test session with one objective: measure the real car in enough detail to find every place the simulation was lying to us.
The driver-in-the-loop simulator is central to how we develop the Pikes Peak car. Every setup change, every aero configuration, every tire strategy is tested there first. But a simulator is a model of reality, and models have gaps. The only way to close those gaps is to go to the track with the real car, instrument it to an extreme degree, and compare what the data says to what the simulation predicted.
That is what this test was for. Not lap times. Not records. Data.
The Sensor Package
The car was fitted with instrumentation well beyond what you would see in a normal race weekend. Load cells on every pushrod to measure the exact forces going through the suspension. Laser ride height sensors at each corner to track the chassis position relative to the ground in real time. Infrared tire temperature monitoring measuring the outer surface at three points across the tread width on all four tires. On-wheel sensors logging tire pressure and internal temperature. A pitot tube at the front measuring dynamic air pressure. On top of all the standard racecar sensors — wheel speeds, brake pressures, steering angle, throttle position, damper potentiometers, accelerometers.
Every parameter logged at high frequency. Every mechanical setup detail documented precisely.
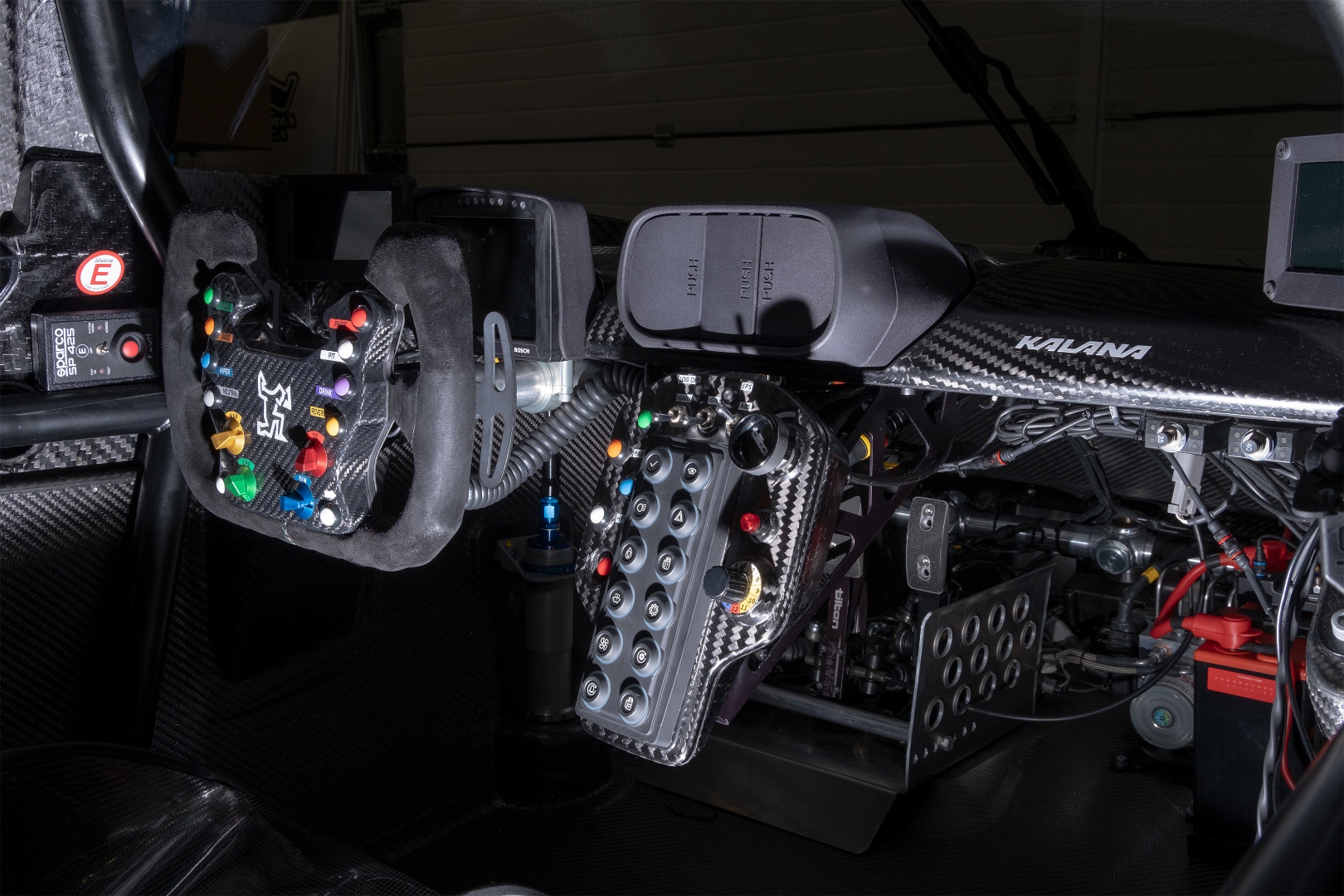
The cockpit. Every input and output is logged.
The Process
The driver runs the car on track in a controlled and repeatable manner. The data acquisition system records everything. Back in the workshop, an identical car is built inside the simulation environment — same geometry, same mass distribution, same aero maps, same tire model. A computer then drives the virtual car through the exact same sequence the real driver completed, using the logged steering, throttle, and brake inputs.
If the simulation were perfect, the virtual and real data would overlay exactly. They do not. They never do. The deviations are where the work begins.
Every discrepancy between the real and simulated data traces is analyzed to identify its cause. A mismatch in yaw rate might point to an error in the tire model's lateral force curve. A deviation in ride height under braking might reveal that the aero load map is wrong at a specific speed and pitch angle. A difference in pushrod load through a corner might mean the anti-roll bar stiffness model does not match reality.
Each cause is isolated, corrected, and verified. Then the simulation is run again. The deviations shrink. The model gets closer to the truth.

The development mule, fully instrumented for correlation testing.
Why This Matters for Pikes Peak
We cannot test at Pikes Peak. The mountain is open to racing one week per year. We cannot run the car at 4,300 meters to check our assumptions about aero performance in thin air. We cannot practice the 156 turns. We get one attempt.
Everything that cannot be tested on the mountain must be tested in the simulator. And for that to mean anything, the simulator must be accurate. Not perfect — that is not possible. But accurate enough that when we make a decision based on simulation data, we can trust it.
This test session was one piece of a long and deliberate process to earn that trust. The data from Porsche Ring fed directly into the models that will be used to develop the Pikes Peak car. Every corrected assumption makes the virtual mountain a more honest representation of the real one.
The simulation will still be wrong. Our job is to make sure it is wrong in ways we understand and can account for.
